步進(jìn)閉環(huán)驅(qū)動器應(yīng)用領(lǐng)域及特點(diǎn)
步進(jìn)閉環(huán)驅(qū)動器應(yīng)用領(lǐng)域:適合激光加工設(shè)備、雕刻設(shè)備、醫(yī)療設(shè)備、測量設(shè)備、電子加工設(shè)備、紡織服裝設(shè)備等,特別適用于短距離、短時(shí)間的快速啟停和零速穩(wěn)停應(yīng)用場合。
了解詳情



步進(jìn)閉環(huán)驅(qū)動器應(yīng)用領(lǐng)域:適合激光加工設(shè)備、雕刻設(shè)備、醫(yī)療設(shè)備、測量設(shè)備、電子加工設(shè)備、紡織服裝設(shè)備等,特別適用于短距離、短時(shí)間的快速啟停和零速穩(wěn)停應(yīng)用場合。
了解詳情混合伺服驅(qū)動器:步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別在于: ??矩頻特性不同: ??步進(jìn)電機(jī)的輸出力矩會隨轉(zhuǎn)速升高而下降,交流伺服電機(jī)為恒力矩輸出 ??過載能力不同: ??步進(jìn)閉環(huán)驅(qū)動器:步進(jìn)電機(jī)...
了解詳情位置比例增益 ??設(shè)定位置環(huán)調(diào)節(jié)器的比例增益;設(shè)置值越大,增益越高,剛度越大,相同頻率指令脈沖條件下,位置滯后量越小。但數(shù)值太大可能會引起振蕩或超調(diào);參數(shù)數(shù)值由具體的伺服系統(tǒng)型號和...
了解詳情
伺服驅(qū)動器雖然市場上存在通用化的伺服產(chǎn)品系列,但是為某種特定應(yīng)用場合專門設(shè)計(jì)制造的伺服系統(tǒng)比比皆是。 ??利用磁性材料不同性能、不同形狀、不同表面粘接結(jié)構(gòu)(SPM)和嵌入式永磁(IPM)...
了解詳情
在控制策略上,基于電機(jī)穩(wěn)態(tài)數(shù)學(xué)模型的電壓頻率控制方法和開環(huán)磁通軌跡控制方法都難以達(dá)到良好的伺服特性,普遍應(yīng)用的是基于永磁電機(jī)動態(tài)解耦數(shù)學(xué)模型的矢量控制方法,這是現(xiàn)代伺服系統(tǒng)的核心控...
了解詳情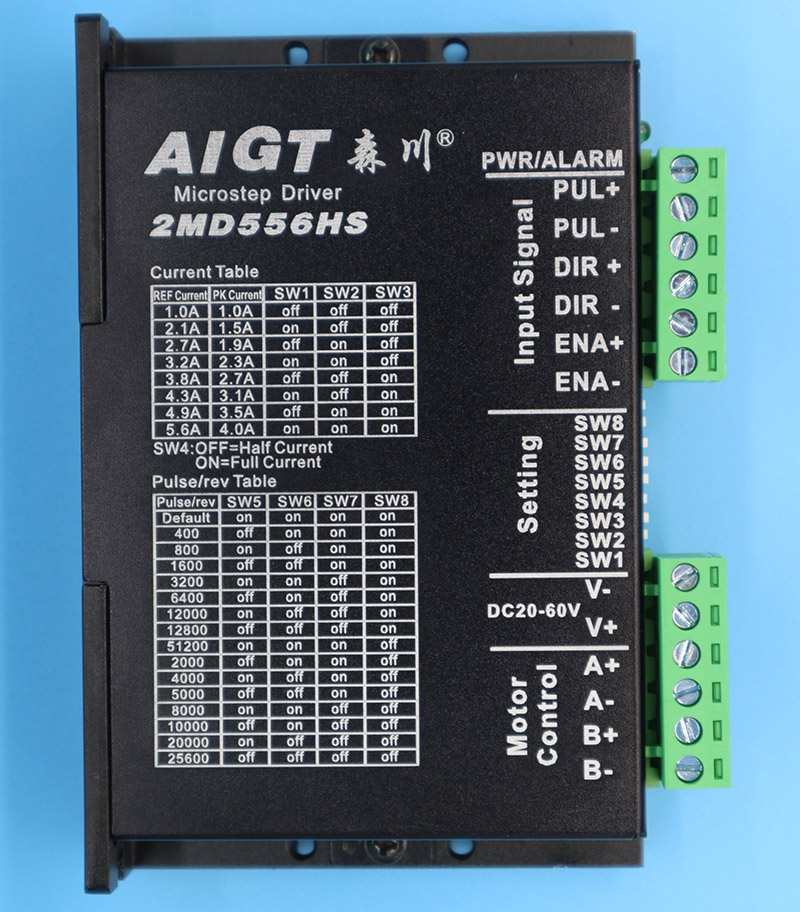
在制袋、充填、封口為一體的包裝機(jī)中,要求包裝用塑料薄膜定位定長供給,無論間歇供給還是連續(xù)供給,都可以用步進(jìn)電機(jī)來可靠完成。
了解詳情
在伺服驅(qū)動器速度閉環(huán)中,電機(jī)轉(zhuǎn)子實(shí)時(shí)速度測量精度對于改善速度環(huán)的轉(zhuǎn)速控制動靜態(tài)特性至關(guān)重要。為尋求測量精度與系統(tǒng)成本的平衡,一般采用增量式光電編碼器作為測速傳感器
了解詳情
交流伺服電機(jī):步進(jìn)電機(jī)在低速時(shí)易出現(xiàn)低頻振動現(xiàn)象。振動頻率與負(fù)載情況和驅(qū)動器性能有關(guān),一般認(rèn)為振動頻率為電機(jī)空載起跳頻率的一半。
了解詳情伺服驅(qū)動器,是大功率交流伺服,和變頻器通用。將參數(shù)設(shè)置為V/F方式,即進(jìn)入開環(huán)工作模式,和變頻器工作方式是一樣的。該伺服適應(yīng)永磁同步電動機(jī)和普通交流電動機(jī)。無須屏蔽編碼器報(bào)警。需要編...
了解詳情
(1)無電刷、低干擾 無刷電機(jī)除刷,直接的變化是無刷電機(jī)在電火花操作中,從而大大減少了電火花對遙控?zé)o線電設(shè)備的干擾。 (2)噪音低,運(yùn)轉(zhuǎn)順暢 無刷電機(jī)無刷,摩擦力大大降低,運(yùn)行平穩(wěn),噪...
了解詳情